前回、タクトスイッチを使って外から解錠するやつを作りました。今回はいよいよスマートロックっぽいことをしていきます。なんと指紋認証に挑戦です。意外と簡単に、かつ安くできましたのでご紹介します。
作りたいもの
前回 のつづきです。ICカードで解錠はいったん置いておきます。(作ったけど、記事にするのが面倒くさい。。。)
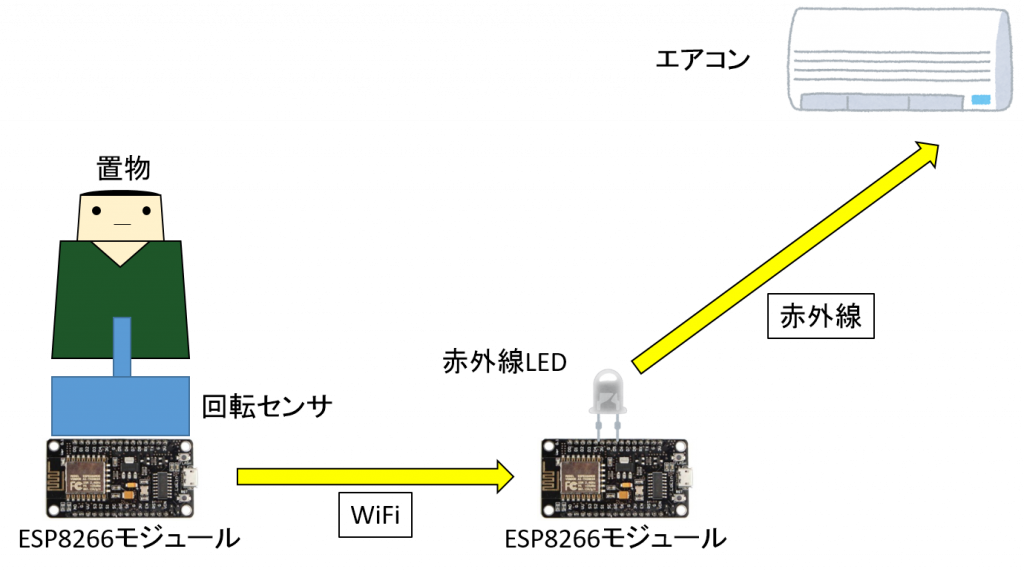
今回の目標は、指でセンサにふれると解錠してくれるスマートロックを作ることです。
- ドアが閉まったら自動で施錠
- 暗証番号で解錠
ICカードで解錠- 指紋認証で解錠
- スマホを持って近づくだけで解錠
前回から追加で必要なもの
- 指紋モジュールDY50 1200円くらい
Amazonで最安だった指紋認識モジュールです。高いやつだと4000円くらいするのにこちらは1200円なのでちょっと不安ですが、きちんと認識してくれます。若干認識までにかかる時間が長いかも?。指を置いてから0.5~1秒くらいかかります。
導線にピンヘッダをはんだ付けする
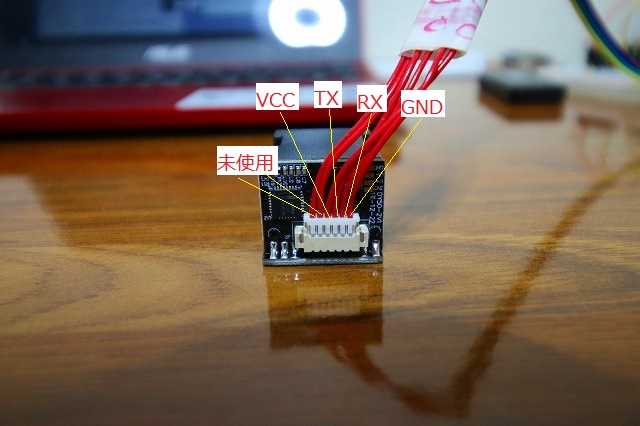
指紋モジュールから出ている線はVCC、GND、TX、RXの四本です。これをArduinoで接続するためにピンをはんだ付けします。
(以下、作業途中の写真を撮るのを忘れたのでイメージ画像です。)
モジュール付属のコネクタ・ケーブルを半分に切断して、ジャンパワイヤとピンをはんだ付けしていきます。


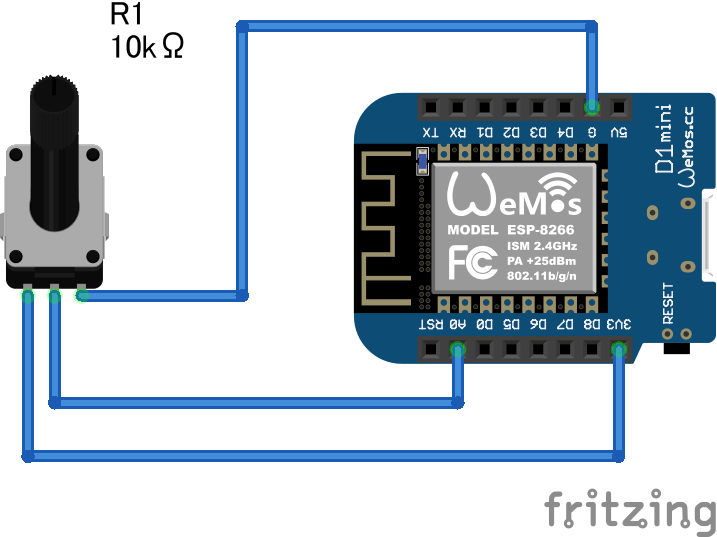
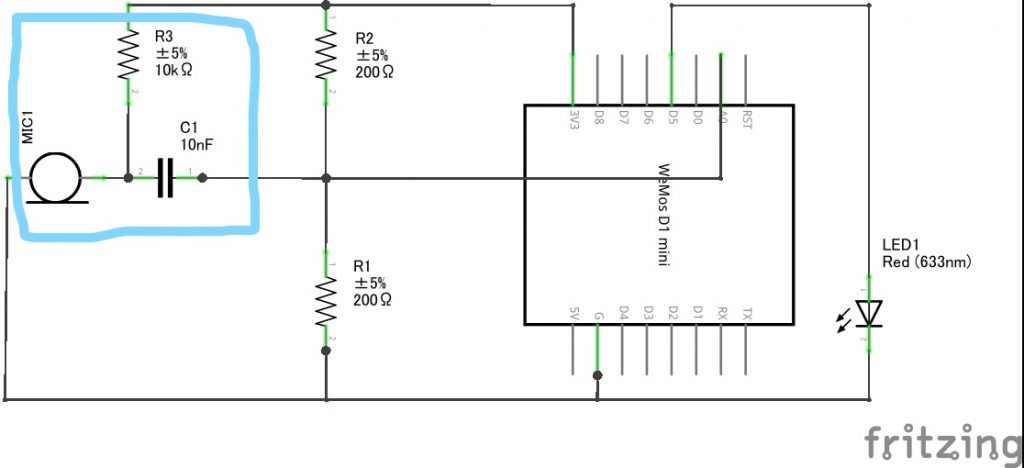
ちなみに、モジュールの線の配置はこのようになっています。
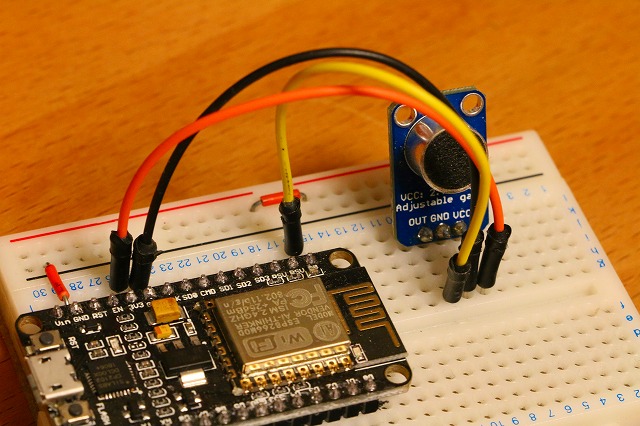
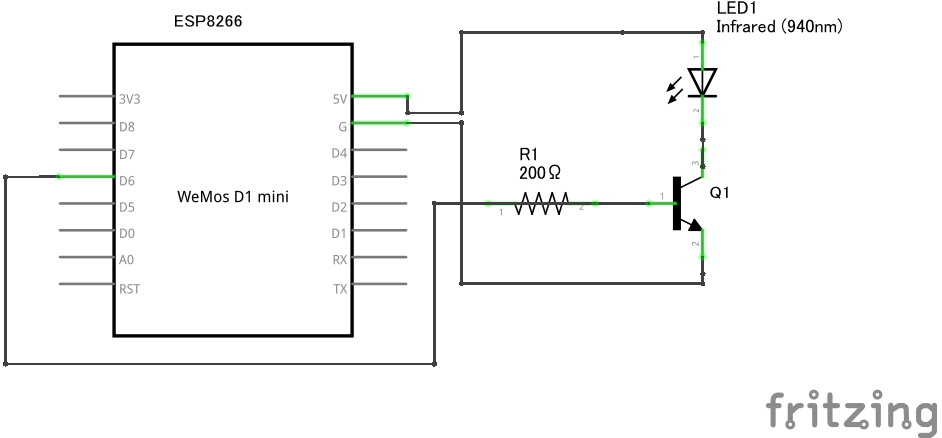
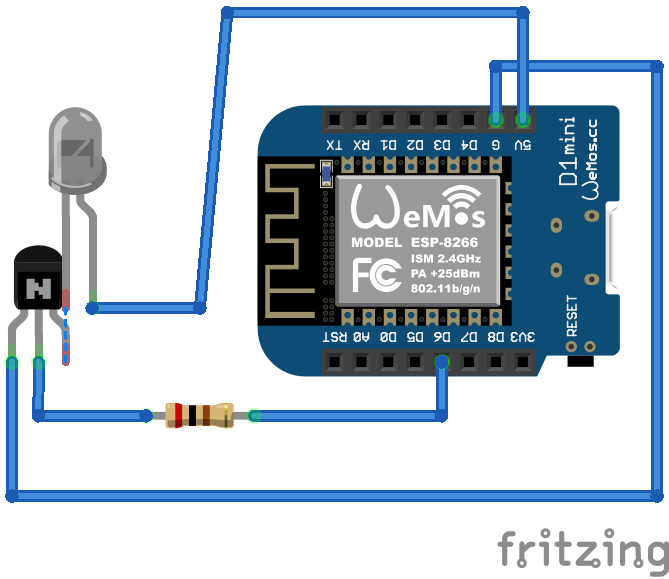
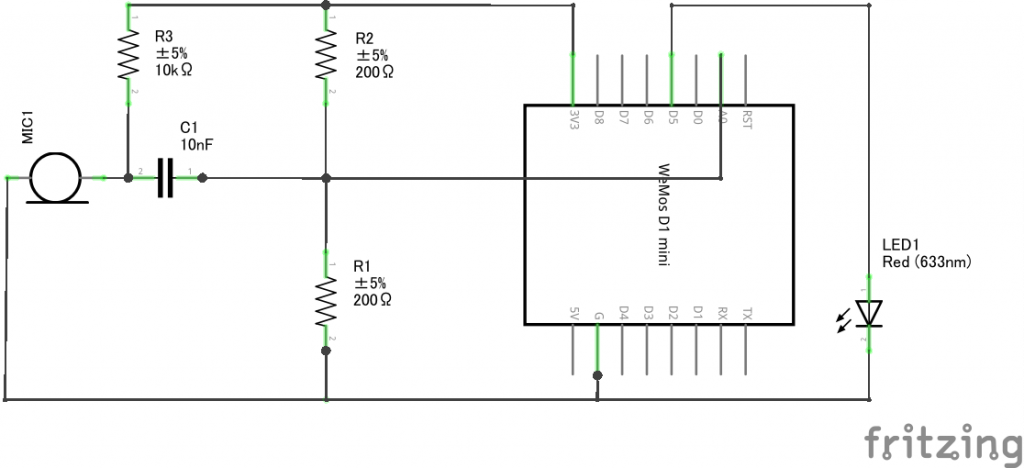
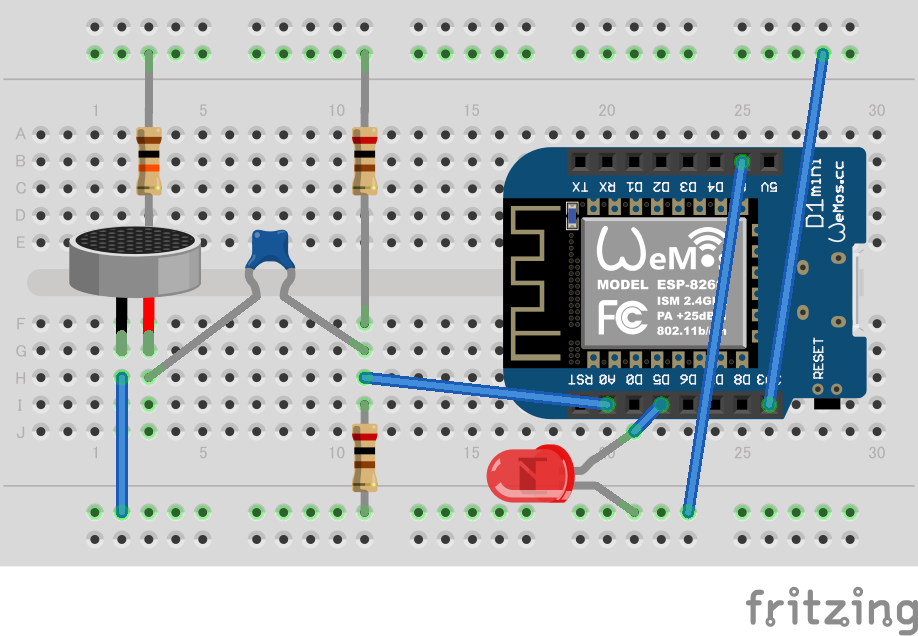
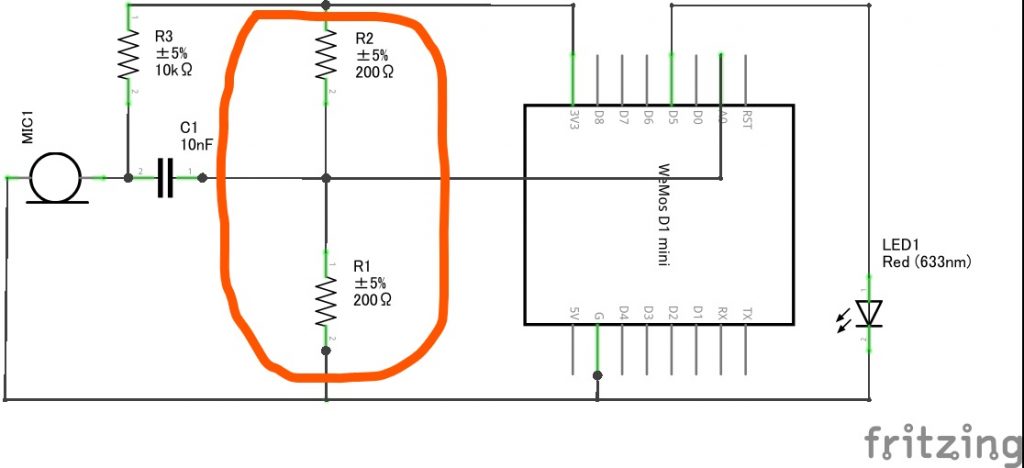
ESP8266に接続
UART接続でESP8266と通信しますので、以下のように接続します。マイコンとの通信はソフトウェアシリアルを使うので、TXとRXをESPのD2とD3につなぎます。(追記:僕が使っているESP8266ではソフトウェアシリアルが使えませんでした!後述します。)
| DY50 | ESP8266 |
| VCC | Vin |
| TX | D2 |
| RX | D3 |
| GND | GND |
指紋認識テスト
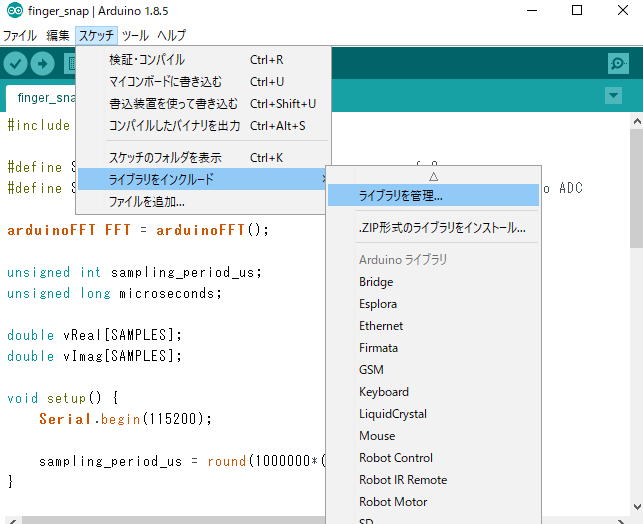
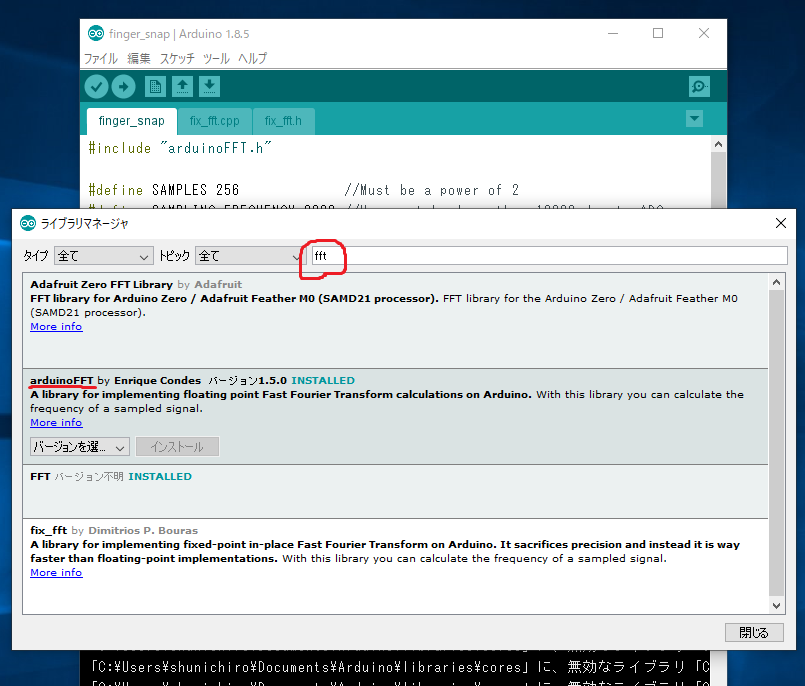
モジュールが接続できたら指紋認証がうまくいくかテストしてみます。ArduinoIDEのライブラリ管理から検索するか、adafruitのgitからモジュール用のドライバとサンプルプログラムをダウンロードします。
ArduinoIDEからサンプルプログラムを開いてenrollを書き込んでみます。これだけで指紋の登録ができる…と色々なサイトに書いてありますが、僕の場合は上手くいきませんでした…。プログラムを走らせてシリアルモニタを開いても「sensor not found.」と表示され、そもそも何も通信できていないようです。
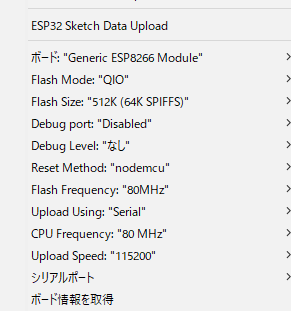
色々調べた結果、原因はESP8266モジュールのソフトウェアシリアルが怪しいと結論づけました。ESP8266はデフォルトの通信レートが119200bpsであるのに対し、このモジュールは9600bpsで通信するので上手くいっていないのだと思います。ネットの記事を調べてESP8266の通信レートを9600に落とす方法を試しましたが、僕の持っているモジュールでは変更しても電源を入れ直すと通信レートが戻ってしまい上手く行きませんでした。
どうするか
ESP8266でソフトウェアシリアルが使えないならどうするか、これに結構悩みました。
案① Arduino UnoとかNanoとか他のモジュールを使う。
ただし、WiFiから解錠したり他の機器との連携は無理。NanoとESPを両方使えばできるがなんか無駄な気がする。
案② ESP8266のハードウェアシリアルを使う。
ただし、シリアルモニタが使えなくなるためデバッグができなくなる。ログをWiFi経由で確認できるようにすれば一応デバッグできる。
3日くらい悩んでましたが、今後WiFiはやっぱり使いたいのと、これまで作ってた基盤がESP用になっているのでまた1から基盤にはんだ付けし直すのが面倒という理由で案②を採用することにしました。
でもこの方法だとシリアルモニタからモジュールに数値を送信することができないんですよね…。指紋の登録時には番号を送信する必要があるので、指紋登録時は①、運用時は②という面倒くさいことになっております。
指紋を登録してみる
指紋登録だけはArduino Nanoを使って行います。adafruitのサンプルプログラムからenrollを書き込んで、指紋モジュールのTXとRXをArduinoのD2とD3につなぎます。
シリアルモニタを開いて、メッセージ通りに番号を入力して指を2回置けば登録完了です。
登録した指紋は電源を切っても保持されているので、よく使う指を全部登録したら次はESPにつないで認証できるかやってみます。
指紋を認識できるかテストしてみる
ここからはモジュールをESP8266につないで作業していきます。ソフトウェアシリアルではなくハードウェアシリアルを使うので接続はモジュールのTX、RXとESPのRX、TXです。また、プログラムの書き込みを行う際はモジュールを外さないと書き込めません。それとシリアルモニタは使えません。
書き込むプログラムはサンプルプログラムfingerprintをちょっと変えるだけでOKです。
// Adafruitのサンプルプログラムfingerprintをハードウェアシリアルに改変
// Serial.printlnは全部コメントアウトしています。
#include <Adafruit_Fingerprint.h>
const int led_pin = 16; // LEDはD0に接続
// On Leonardo/Micro or others with hardware serial, use those! #0 is green wire, #1 is white
// uncomment this line:
// #define mySerial Serial1
// For UNO and others without hardware serial, we must use software serial...
// pin #2 is IN from sensor (GREEN wire)
// pin #3 is OUT from arduino (WHITE wire)
// comment these two lines if using hardware serial
//SoftwareSerial mySerial(2, 3); // ハードウェアシリアルを使うのでコメントアウト
Adafruit_Fingerprint finger = Adafruit_Fingerprint(&Serial); // ハードウェアシリアル
void setup()
{
//Serial.begin(9600);
//while (!Serial); // For Yun/Leo/Micro/Zero/...
//delay(100);
//Serial.println("\n\nAdafruit finger detect test");
// set the data rate for the sensor serial port
finger.begin(57600);
if (finger.verifyPassword()) {
//Serial.println("Found fingerprint sensor!");
} else {
//Serial.println("Did not find fingerprint sensor :(");
while (1) { delay(1); }
}
finger.getTemplateCount();
//Serial.print("Sensor contains "); Serial.print(finger.templateCount); Serial.println(" templates");
//Serial.println("Waiting for valid finger...");
pinMode(led_pin, OUTPUT);
}
void loop() // run over and over again
{
int num = getFingerprintIDez();
// 認証成功したらLEDを光らせる
if( num > 0 ){
digitalWrite(led_pin, HIGH);
delay(1000);
digitalWrite(led_pin, LOW);
}
delay(50); //don't ned to run this at full speed.
}
uint8_t getFingerprintID() {
uint8_t p = finger.getImage();
switch (p) {
case FINGERPRINT_OK:
//Serial.println("Image taken");
break;
case FINGERPRINT_NOFINGER:
//Serial.println("No finger detected");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
//Serial.println("Communication error");
return p;
case FINGERPRINT_IMAGEFAIL:
//Serial.println("Imaging error");
return p;
default:
//Serial.println("Unknown error");
return p;
}
// OK success!
p = finger.image2Tz();
switch (p) {
case FINGERPRINT_OK:
//Serial.println("Image converted");
break;
case FINGERPRINT_IMAGEMESS:
//Serial.println("Image too messy");
return p;
case FINGERPRINT_PACKETRECIEVEERR:
//Serial.println("Communication error");
return p;
case FINGERPRINT_FEATUREFAIL:
//Serial.println("Could not find fingerprint features");
return p;
case FINGERPRINT_INVALIDIMAGE:
//Serial.println("Could not find fingerprint features");
return p;
default:
//Serial.println("Unknown error");
return p;
}
// OK converted!
p = finger.fingerFastSearch();
if (p == FINGERPRINT_OK) {
//Serial.println("Found a print match!");
} else if (p == FINGERPRINT_PACKETRECIEVEERR) {
//Serial.println("Communication error");
return p;
} else if (p == FINGERPRINT_NOTFOUND) {
//Serial.println("Did not find a match");
return p;
} else {
//Serial.println("Unknown error");
return p;
}
// found a match!
//Serial.print("Found ID #"); Serial.print(finger.fingerID);
//Serial.print(" with confidence of "); Serial.println(finger.confidence);
return finger.fingerID;
}
// returns -1 if failed, otherwise returns ID #
int getFingerprintIDez() {
uint8_t p = finger.getImage();
if (p != FINGERPRINT_OK) return -1;
p = finger.image2Tz();
if (p != FINGERPRINT_OK) return -1;
p = finger.fingerFastSearch();
if (p != FINGERPRINT_OK) return -1;
// found a match!
//Serial.print("Found ID #"); Serial.print(finger.fingerID);
//Serial.print(" with confidence of "); Serial.println(finger.confidence);
return finger.fingerID;
}変更点としてはmySerialの部分をSerialに変えて、Serial.printlnをすべてコメントアウトするだけです。
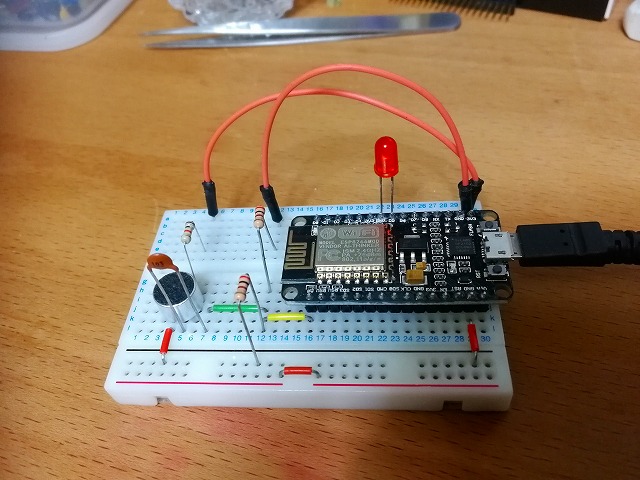
シリアルモニタが使えないので、確認用のLEDをD0とGNDにつけます。認証が成功するとLEDを1秒間光らせます。
認証成功で解錠する
前回 のプログラムの解錠条件に、今回の指紋認証の結果を加えるだけです。最終的なプログラムを載せておきます。
#include <Servo.h>
#include <ESP8266WiFi.h>
#include <ESP8266WebServer.h>
//#include <wifi_setting.h>
#include <Adafruit_Fingerprint.h>
#include <MyFunctions.h>
// ルータ設定
IPAddress ip(192,168,100,102);
IPAddress gateway(192,168,100,1);
IPAddress subnet(255,255,255,0);
// ESP8266のピン番号
const int servo_pin = 2;
const int door_pin = 12;
const int button_pin = 14;
Servo myservo; // サーボオブジェクトを生成
int door_sensor = LOW;
int door_sensor_last = LOW;
ESP8266WebServer server(80); //サーバーオブジェクト
Adafruit_Fingerprint finger = Adafruit_Fingerprint(&Serial); // ハードウェアシリアル
LogBuffer action_log(64);
void door_open(){
myservo.attach(servo_pin);
delay(50);
myservo.write(170);
delay(500);
myservo.write(90);
delay(500);
myservo.detach();
}
void door_close(){
myservo.attach(servo_pin);
delay(50);
myservo.write(10);
delay(500);
myservo.write(90);
delay(500);
myservo.detach();
}
void handle_open(){
door_open();
server.send(200, "text/html", "opened");
}
void handle_close(){
door_close();
server.send(200, "text/html", "closed");
}
void handle_log(){
server.send(200, "text/html", action_log.to_HTML());
}
bool secret_command(){
// HIGHがスイッチが押されていない状態
// LOWがスイッチが押されている状態
unsigned long pressed_time = millis();
unsigned long released_time = millis();
int now_state = LOW;
int last_state = LOW;
float button_lpf = 0.0; // センサ信号にローパスフィルタ(LPF)をかけた値
String key = "---.--..-."; //モールス符号でO・P・E・N
String input = "";
while(millis() - released_time < 3000){
button_lpf = 0.9 * button_lpf + 0.1 * digitalRead(button_pin);
if( button_lpf > 0.8 ){
now_state = HIGH;
}else if( button_lpf < 0.2 ){
now_state = LOW;
}
if( last_state == HIGH && now_state == LOW ){
// ボタンが押されたとき、HIGH→LOW
pressed_time = millis();
}else if( last_state == LOW && now_state == HIGH){
// ボタンが離されたとき、LOW→HIGH
released_time = millis();
// ボタンを押していた時間で「.」か「-」を追加
input += (released_time - pressed_time < 300) ? "." : "-";
}
last_state = now_state;
delay(1);
}
if(key == input){
return true;
}else{
return false;
}
}
int getFingerprintIDez() {
uint8_t p = finger.getImage();
if (p != FINGERPRINT_OK) return -1;
p = finger.image2Tz();
if (p != FINGERPRINT_OK) return -1;
p = finger.fingerFastSearch();
if (p != FINGERPRINT_OK) return -1;
// found a match!
//action_log.add("Found ID #"); action_log.add(finger.fingerID);
//action_log.add(" with confidence of "); action_log.add(finger.confidence);
return finger.fingerID;
}
void setup()
{
//固定IPで運用するときの設定
WiFi.config(ip, gateway, subnet);
//WiFi.begin(WIFI_SSID, WIFI_PWD);
// WiFiに接続するまで待つ
action_log.add("");
while(WiFi.status() != WL_CONNECTED){
delay(1000);
action_log.add(".");
}
action_log.add("");
action_log.add("Connected!");
action_log.add("IP Address: ");
action_log.add(WiFi.localIP());
// Webサーバを設定
server.on("/open", handle_open);
server.on("/close", handle_close);
server.on("/log", handle_log);
server.begin();
// 開閉センサの入力を内部プルアップにする
pinMode(door_pin, INPUT_PULLUP);
// サーボ変数をピンに割り当て
myservo.attach(servo_pin);
door_close();
// 指紋センサ
finger.begin(57600);
if (finger.verifyPassword()) {
action_log.add("Found fingerprint sensor!");
} else {
action_log.add("Did not find fingerprint sensor :(");
while (1) { delay(1); }
}
finger.getTemplateCount();
action_log.add("Sensor contains "); action_log.add(finger.templateCount); action_log.add(" templates");
action_log.add("Waiting for valid finger...");
}
void loop()
{
// サーバとして待ち受ける
server.handleClient();
// 現在のドアの開閉を検知
// LOW=閉
// HIGH=開
door_sensor = digitalRead(door_pin);
// 「開」→「閉」になったタイミングでサーボモータを回す
if(door_sensor == LOW && door_sensor_last == HIGH){
delay(1000);
door_close();
}
door_sensor_last = door_sensor;
// ボタンで解錠
if(digitalRead(button_pin) == LOW){
bool success = secret_command();
if(success){
door_open();
}
}
// 指紋で解錠
if( getFingerprintIDez() > 0 ){
door_open();
action_log.add("Door opened.");
}
delay(10);
}シリアルモニタが使えないのでWiFiからログを確認できる機能を追加しています。何かメッセージを出したいときはaction_logに保存しておき、http://192.168.xxx.xxx/logで表示します。action_logのクラスはMyFunction.hに別ファイルとして書いてます。
以上です。
(追記予定)