
はじめに
研究でデプスセンサを使うことがよくあるのですが、デプスセンサからの送られてくるsensor_msgs::PointCloud2形式のデータの扱いについて困った事がありました。例えばあるxy座標でのz座標を取り出したり、ある範囲のデータだけ取り出したりするのが意外と難しかったので、つまずいたことをまとめておきます。
データ形式
ROSの公式ドキュメントを見ればデータ形式そのものはわかるのですが、意味を理解するのにちょっと時間がかかりました。
まず、ポイントクラウドのデータ本体は「data」にあります。これは8ビット(0~255)の数字の列になっていますが、このデータの読み方を定義しているのが「fields」です。ROSのトピックを見てみると、次のようなデータになっていることがわかります。
rostopic echo /point_cloud/fields - name: "x" offset: 0 datatype: 7 count: 1 - name: "y" offset: 4 datatype: 7 count: 1 - name: "z" offset: 8 datatype: 7 count: 1 --
fieldsは配列になっていて、各データの見方を表しています。
各fieldの見方について説明すると、
- [name]:値の名前
- [offset]:先頭から何番目に始まっているか
- [datatype]:データ型
- [count]:何個のデータが入っているか(?)
を表します。つまりデータの入れ方は次のようになります。
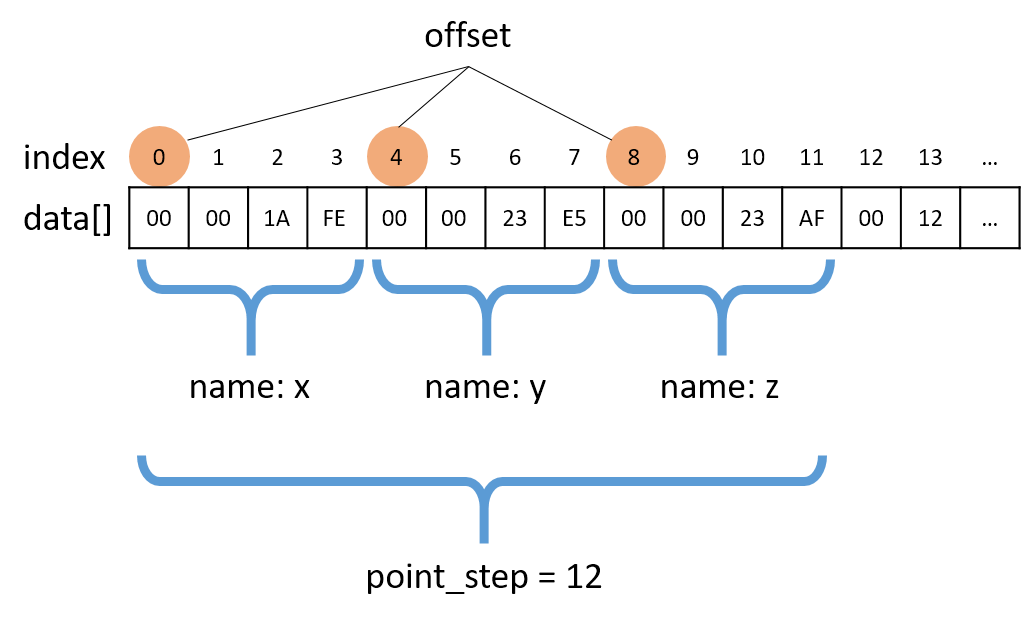
point_stepは1つの点を何個のデータで表すか、で今回は12となります。
さて、xyz各データの読み方ですが、これはfieldのdatatypeで読むことになります。ドキュメントによると今回のデータ型「7」はfloat32を意味するとのことなので、この4バイトをfloat型で読み込めばいいということになります。(4バイトをfloatにする方法はネットに資料が沢山ありますので割愛します。)
data[]とfields[]以外のデータは主にポイントクラウドの大きさなどを表す情報で、
- [height]:高さ
- [width]:幅
- [is_bigendian]:datatypeがビッグエンディアンかどうか
- [point_step]:1つの点を何個のデータで表すか
- [row_step]:1行を何個のデータで表すか
- [is_dense]:すべての値が正常かどうか
などがあります。
ROSの勉強…
助かりました。この情報をずっと探してました。
とても参考になりました。ありがとうございます。